Mīkini Palletizer Robot piha piha me ka lima Robot


Mīkini Palletizer Robot piha piha me ka lima Robot
Māhele Nui
AGV AMR / hāpai ʻana i ka jack up AGV AMR / kaʻa alakaʻi ʻakomi AGV / AMR autonomous mobile robot / kaʻa AGV AMR no ka lawelawe ʻana i nā mea ʻoihana / mea hana Kina AGV robot / hale kūʻai AMR / AMR hāpai ʻana i ka jack up laser SLAM hoʻokele / AGV AMR mobile robot / AGV AMR chassis laser SLAM hoʻokele / robot logistic akamai
Ke hoʻolauna nei i ka lima lawelawe robotic palletizing, bagging a me ka pahu pahu e hoʻololi nei i ka pāʻani, kahi hopena kipi e hoʻololi i nā kaʻina hana hoʻopili a me ka lawelawe ʻana o ka ʻoihana. Ua hoʻolālā ʻia kēia lima robotic ʻoi loa e hoʻonui i ka pono a me ka huahua me ka hōʻoia ʻana i ka lawelawe palekana a me ka palekana o nā ʻeke, nā pahu a me nā pūʻolo.
I ka hoʻomau ʻana o ka pono no ka wikiwiki a me ka pololei i ka hana ʻana a me ka logistics, ʻo kā mākou mau lima robot lawelawe palletizing ʻoihana, stacking, bag and case packaging ka pane hope loa. Ua hala nā lā o ka hana lima a me ka pilikia o ka hewa kanaka. Ua hoʻolālā ʻia kēia lima robot holomua e maʻalahi i ka palletizing, stacking a me ka lawelawe ʻana i nā ʻano ʻeke, pahu a me nā pūʻolo āpau, e hāʻawi ana i nā hana maʻalahi me ka liʻiliʻi o ka downtime.
ʻO ka lima lawelawe robotic no ka hoʻohana ʻoihana, ka palletizing, ka hoʻopaʻa ʻana, a me ka hoʻopili ʻana i nā ʻeke a me nā pahu, he mau hiʻohiʻona like ʻole e hoʻokaʻawale iā ia mai nā ʻano kuʻuna. Ua lako ka lima robotic me nā mea ʻike a me nā ʻenehana hou loa e hōʻoia i ka neʻe pololei a kūlike, e hoʻopau ana i ka hiki ke hana hewa a hōʻino paha i nā huahana e lawelawe ʻia nei. ʻO kona mau hiki ke wikiwiki, i hui pū ʻia me ka hiki ke ʻike pololei a hoʻoponopono i nā ʻano a me nā nui like ʻole, e hoʻonui nui i ka wikiwiki a me ka pono o nā hana hoʻopili.
Eia kekahi, he mea maʻalahi loa kēia lima robotic, e kūpono ana no nā ʻano ʻoihana like ʻole. Mai ka hana ʻana i ka meaʻai a i nā lāʻau lapaʻau, ka hale kūʻai a hiki i ka hana ʻana, hiki i kēia hopena robotic ke hoʻololi maʻalahi i nā ʻano wahi a me nā hana like ʻole. Inā paha e lawelawe ana i nā ʻeke o nā kaumaha like ʻole, e hoʻopaʻa ana i nā pahu me ka pololei, a i ʻole e hoʻopaʻa ana i nā huahana me ka mālama, ʻo kā mākou mau lima lawelawe palletizing ʻoihana, stacking, a me ka pahu pahu ka hopena kūpono loa.
I ka hōʻuluʻulu manaʻo, ʻo ka Industrial Palletizing Bag Box Packaging Robot Handling Arm he mea hoʻololi pāʻani i ka honua hoʻopili ʻoihana a me ka lawelawe ʻana. Me kāna mau hiʻohiʻona holomua, ka pono kūpono ʻole a me ka versatility, e hoʻololi hou kēia hopena kipi i ka ʻoihana ma ka hoʻonui nui ʻana i ka huahana, ka hoʻemi ʻana i nā kumukūʻai hana a me ka hōʻoia ʻana i ka palekana huahana. E noho i mua o ka hoʻokūkū a apo i ka wā e hiki mai ana o ka automation ʻoihana me kā mākou mau lima robotic ʻoi loa.
Noi

ʻO AMB Series Unmanned Chassis AMB (Auto Mobile Base) no ke kaʻa autonomous agv, kahi chassis honua i hoʻolālā ʻia no nā kaʻa alakaʻi autonomous agv, hāʻawi i kekahi mau hiʻohiʻona e like me ka hoʻoponopono palapala ʻāina a me ka hoʻokele localization. Hāʻawi kēia chassis unmanned no ke kaʻa agv i nā interfaces ākea e like me I/O a me CAN e kau i nā modula luna like ʻole me nā polokalamu client ikaika a me nā ʻōnaehana hoʻouna e kōkua i nā mea hoʻohana e hoʻopau koke i ka hana ʻana a me ka hoʻohana ʻana i nā kaʻa autonomous agv. Aia he ʻehā mau lua kau ma luna o ka chassis unmanned series AMB no nā kaʻa alakaʻi autonomous agv, e kākoʻo ana i ka hoʻonui ʻana me ka jacking, rollers, manipulators, latent traction, display, etc. e hoʻokō i nā noi he nui o hoʻokahi chassis. Hiki iā AMB me SEER Enterprise Enhanced Digitalization ke hoʻokō i ka hoʻouna ʻana a me ka hoʻolaha ʻana o nā haneli o nā huahana AMB i ka manawa like, kahi e hoʻomaikaʻi nui ai i ka pae akamai o ka logistics kūloko a me ka halihali i loko o ka hale hana.
Hiʻona
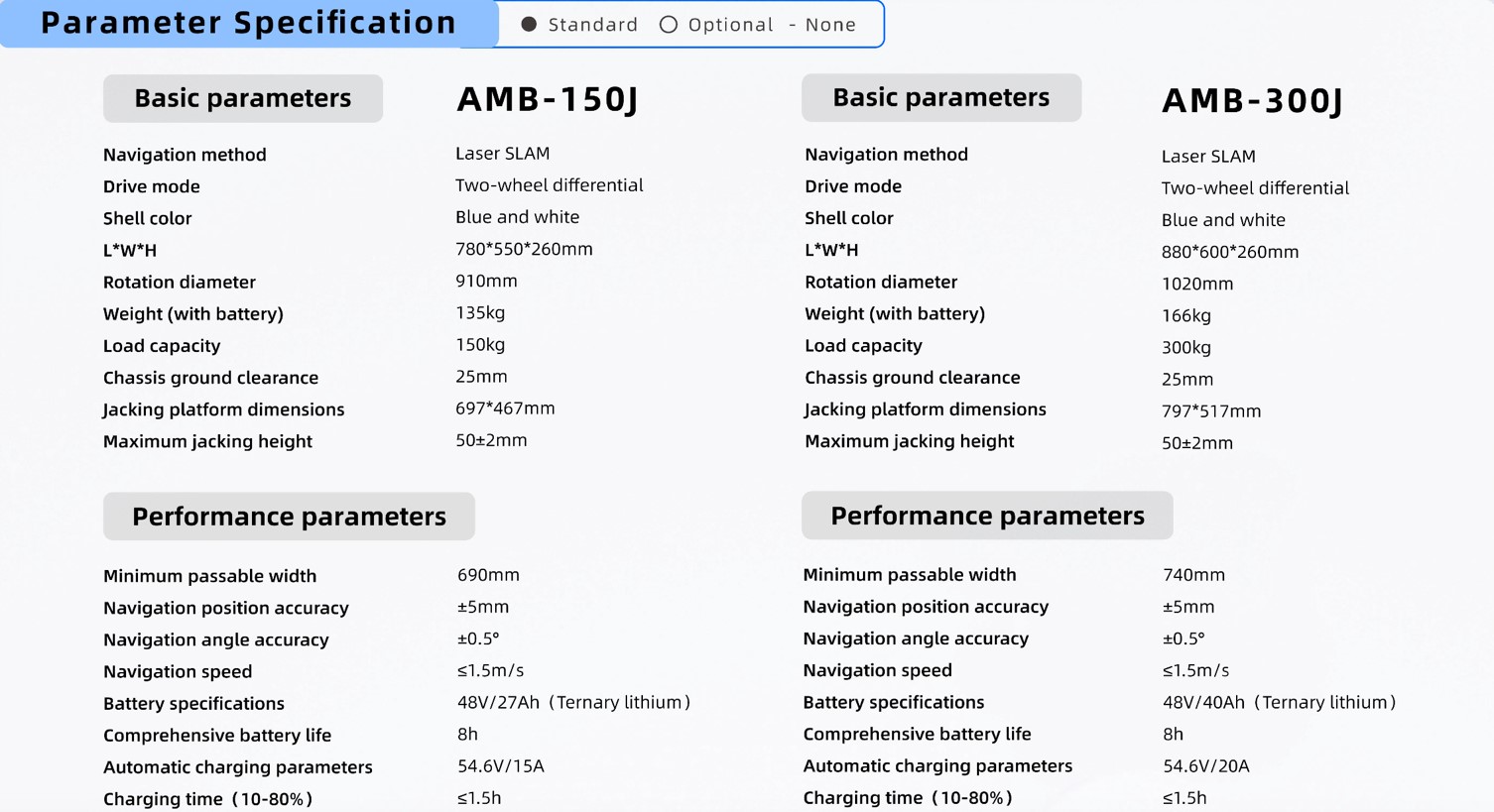
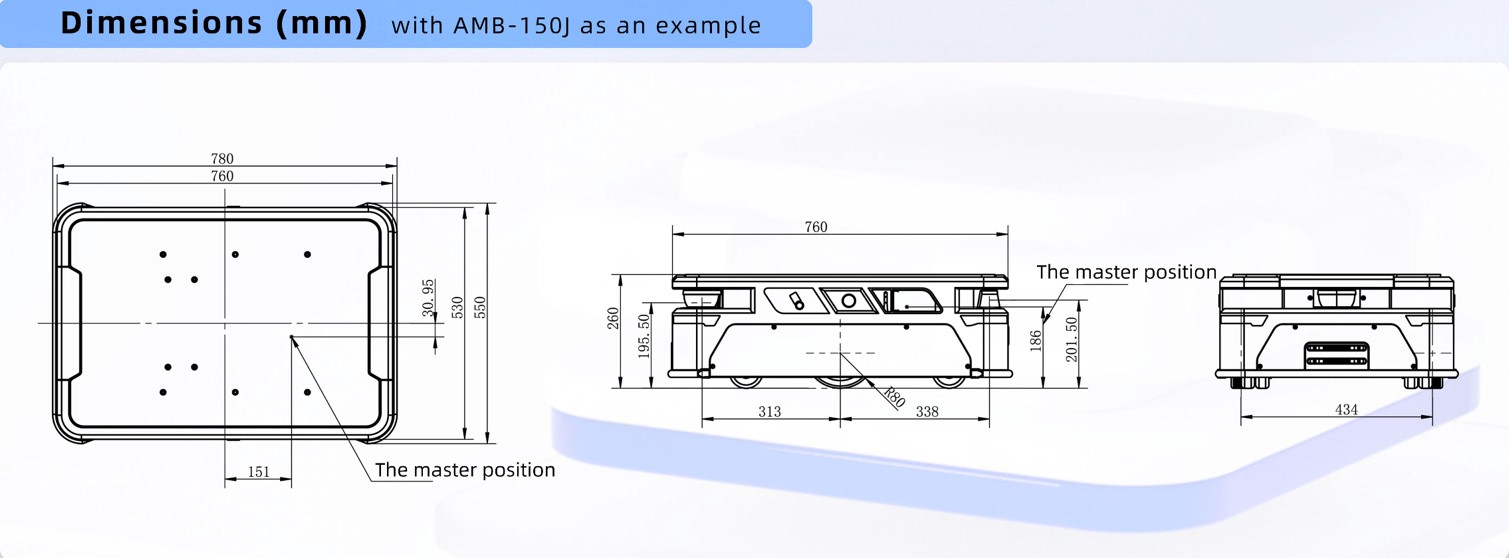
·ka mana ukana: 150kg a me 300kg
·kiʻekiʻe loa o ke kau ʻana: 50mm
· pololei o ke kūlana hoʻokele: ±5mm
· pololei o ke kihi hoʻokele: ±0.5°
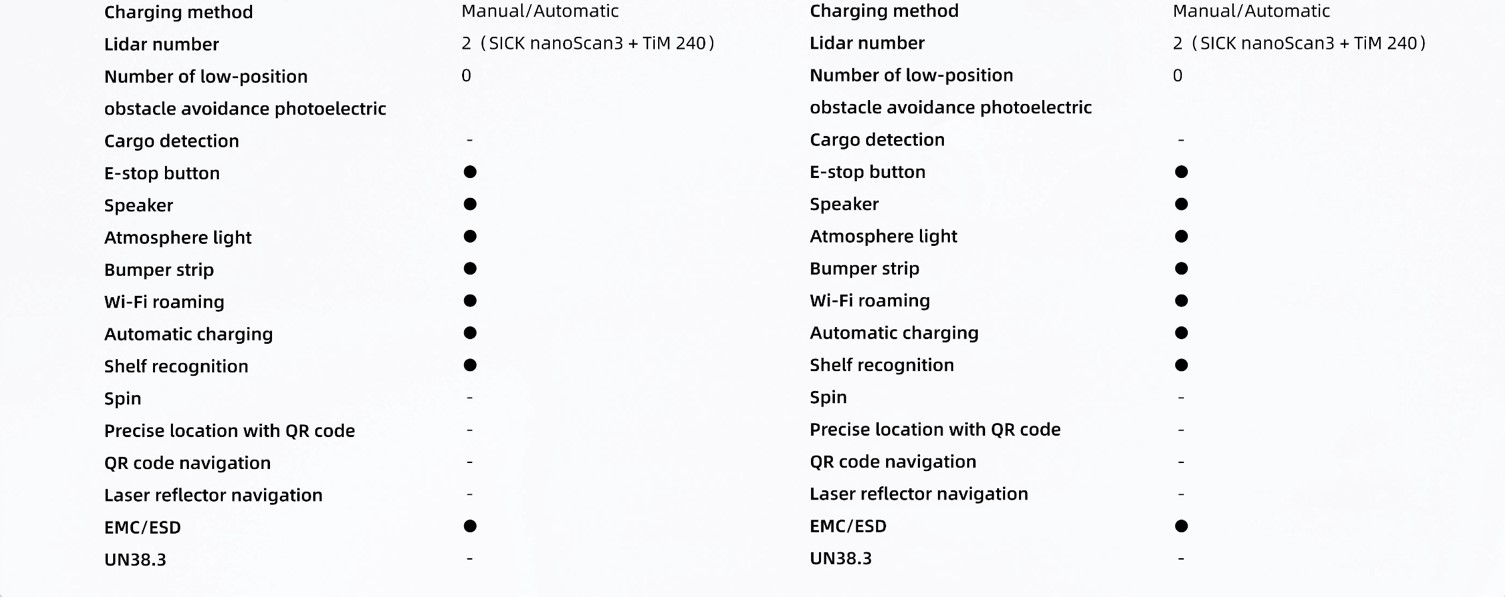
● Loaʻa nā hiʻohiʻona waiwai i kēlā me kēia manawa
ʻO nā hiʻohiʻona maʻamau piha a maikaʻi loa a me nā hiʻohiʻona holomua waiwai a kūpono hoʻi e kōkua i nā mea kūʻai aku e hoʻokō maʻalahi i nā logistics akamai.
● Loaʻa nā kahua kikoʻī he nui no ka hoʻonui ʻana
E hoʻolako i nā kahua 150kg a me 300kg e hoʻokō i nā koi ukana a me nā hiʻohiʻona o nā ʻoihana like ʻole. Hiki ke hoʻohana ʻia me nā manipulators, rollers, jacking, latent traction, pan/tilt, display screen, etc. e hoʻokō i nā noi he nui me hoʻokahi chassis.
● ±5 mm, kūpono a pololei hoʻi
Hoʻohana ʻia ka algorithm Laser SLAM e hoʻokō i ka localization kiʻekiʻe, me ka pololei o ka laser non-reflective repeated locating i loko o ±5 mm, e hiki ai ke hoʻopaʻa pono ma waena o nā robots kelepona a me nā kānaka, a me ke kahe pono o nā ukana ma waena o nā wahi like ʻole. Nānā: Pili nā waiwai maoli i nā kūlana o ke kaiapuni.
● Hoʻokele paʻa no ka palekana a me ka hilinaʻi
Ua hoʻohui pono ʻia a hoʻololi ʻia ka hoʻokele Laser SLAM, ka hoʻokele reflector laser, ka hoʻokele QR code a me nā ʻano hoʻokele ʻē aʻe e hōʻoia i ka hana paʻa o ka lopako kelepona.
● Hoʻolaha maʻalahi a me ka hoʻokele ʻike maka ʻia
Hiki i kahi laulā piha o nā polokalamu kākoʻo a me nā ʻōnaehana kikohoʻe ke hoʻokō maʻalahi i ka hana, ka hoʻonohonoho ʻana a me ka hoʻokele ʻike o nā robots kelepona, a hoʻopili pono me ka ʻōnaehana MES o ka hale hana e hoʻokō maoli i ka logistics akamai.
Nā Huahana Pili



Palena kikoʻī
ʻO kā mākou ʻoihana


Nā māhele huahana
-

Cobot Kina Aubo-I10 Brazo Robó Tico Industrial...
-

ʻO ka lima lopako hana ʻoihana liʻiliʻi 4 Axis Scara ...
-

ʻOihana Hana Lima Manipulator 6 Axis Akamai ...
-

ʻO ka polokalamu lako paʻa lima lopako ʻoihana ...
-

Iimt Collaborative Robot Industrial Robots 6 Ax...
-

6 Axis Industrial Robotic Collaborative Robot A...