MOʻOLELO HOʻOLOI WIKIWIKI – QCA-25 He Mea Hoʻololi Wikiwiki ma ka Hopena o kahi Robot



Māhele Nui
Mea Hoʻololi Mea Hana Lopako / Mea Hoʻololi Mea Hana Hopena Lima (EOAT) / ʻŌnaehana Hoʻololi Wikiwiki / Mea Hoʻololi Mea Hana Akomi / Mea Hoʻohui Mea Hana Lopako / ʻAoʻao Lopako / ʻAoʻao Paʻa / Hoʻololi Mea Hana / Hoʻokuʻu Wikiwiki / Mea Hoʻololi Mea Hana Pneumatic / Mea Hoʻololi Mea Hana Uila / Mea Hoʻololi Mea Hana Hydraulic / Mea Hoʻololi Mea Hana Pololei / ʻAno Laka Palekana / Mea Hoʻokō Hopena / Hana Hana Aunoa / Ka Pono o ka Hoʻololi Mea Hana / Hoʻololi Mea Hana / Hana Aunoa ʻOihana / Mea Hana Lopako Hopena Lima / Hoʻolālā Modular
Noi
Hoʻohana nui ʻia ka End-of-Arm Tooling (EOAT) i nā ʻoihana e like me ka hana kaʻa, nā mea uila 3C, logistics, injection molding, food and pharmaceutical packaging, a me ka hana metala. ʻO kāna mau hana nui e pili ana i ka lawelawe ʻana i nā ʻāpana hana, ka hoʻoheheʻe ʻana, ka pīpī ʻana, ka nānā ʻana, a me ka hoʻololi wikiwiki ʻana i nā mea hana. Hoʻonui nui ʻo EOAT i ka pono o ka hana ʻana, ka maʻalahi, a me ka maikaʻi o ka huahana, e lilo ia i ʻāpana koʻikoʻi o ka automation ʻoihana hou.
Hiʻona
Kiʻekiʻe-pololei
ʻO ka ʻaoʻao paʻa lima hoʻoponopono piston ke kuleana o ke kau ʻana, kahi e hāʻawi ai i ka pololei o ke kau hou ʻana. Hōʻike nā hoʻokolohua hoʻokahi miliona pōʻaiapuni he ʻoi aku ka kiʻekiʻe o ka pololei maoli ma mua o ka waiwai i ʻōlelo ʻia.
Ikaika kiʻekiʻe
ʻO ka piston laka me ke anawaena cylinder nui he ikaika laka ikaika, ʻo ka hāmeʻa wikiwiki o ka hopena lopako SCIC he ikaika anti torque. I ka wā e laka ai, ʻaʻohe haʻalulu ma muli o ka neʻe wikiwiki, no laila e pale aku ai i ka hāʻule ʻana o ka laka a me ka hōʻoia ʻana i ka pololei o ke kau ʻana.
Hana kiʻekiʻe
Hoʻohana ʻia ka ʻōnaehana laka me ka hoʻolālā ʻili conical multi, nā ʻāpana sila lōʻihi a me ka ʻimi hoʻopili elastic kiʻekiʻe e hōʻoia i ka pili kokoke o ka module hōʻailona.



Palena kikoʻī
| Moʻo Hoʻololi wikiwiki | ||||
| Hoʻohālike | Ka nui o ka ukana | Ala kinoea | Ka Ikaika Laka @ 80Psi (5.5Bar) | Kaumaha huahana |
| QCA-05 | 5kg | 6-M5 | 620N | 0.4kg |
| QCA-05 | 5kg | 6-M5 | 620N | 0.3kg |
| QCA-15 | 15kg | 6-M5 | 1150N | 0.3kg |
| QCA-25 | 25kg | 12-M5 | 2400N | 1.0kg |
| QCA-35 | 35kg | 8-G1/8 | 2900N | 1.4kg |
| QCA-50 | 50kg | 9-G1/8 | 4600N | 1.7kg |
| QCA-S50 | 50kg | 8-G1/8 | 5650N | 1.9kg |
| QCA-100 | 100kg | 7-G3/8 | 12000N | 5.2kg |
| QCA-S100 | 100kg | 5-G3/8 | 12000N | 3.7kg |
| QCA-S150 | 150kg | 8-G3/8 | 12000N | 6.2kg |
| QCA-200 | 300kg | 12-G3/8 | 16000N | 9.0kg |
| QCA-200D1 | 300kg | 8-G3/8 | 16000N | 9.0kg |
| QCA-S350 | 350kg | / | 31000N | 9.4kg |
| QCA-S500 | 500kg | / | 37800N | 23.4kg |

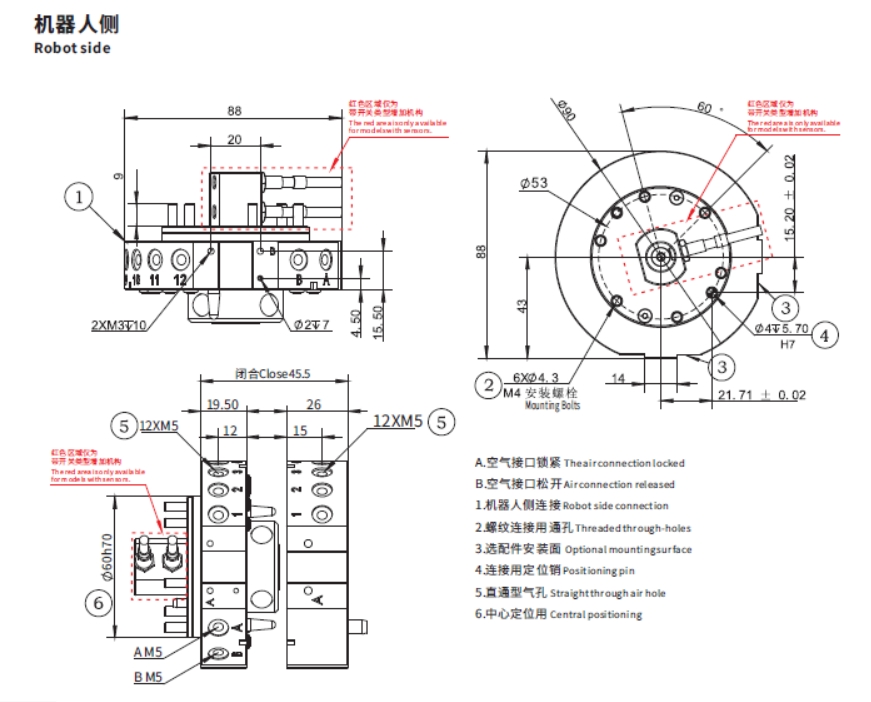
ʻAoʻao lopako

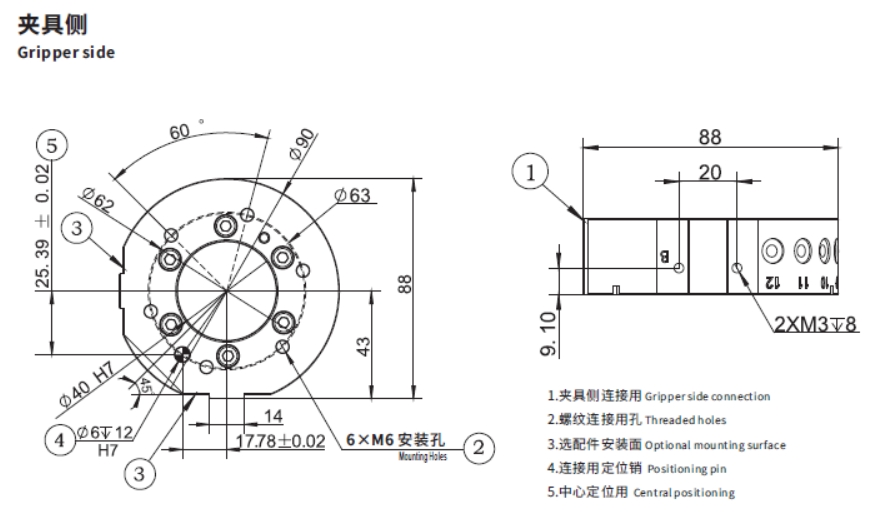
ʻAoʻao paʻa

Kuapo kaula ʻaoʻao robot
Modula Pili
ʻAno Modula
| Inoa Huahana | Hoʻohālike | PN | Anakahi Hana | Ke Hana Nei | Mea hoʻohui | Mea Hoʻohui PN |
| Modula hōʻailona ʻaoʻao robot | QCSM-15R1 | 7.Y00965 | 24V | 2.5A | DB15R1-1000① | 1.Y10163 |
| Modula hōʻailona ʻaoʻao Gripper | QCSM-15G1 | 7.Y00966 | 24V | 2.5A | DB15G1-1000① | 1.Y10437 |
①ʻO ka lōʻihi o ke kaula he 1 mika
Module HF-pololei i waho Laina
| Inoa Huahana | Hoʻohālike | PN |
| Modula alapine kiʻekiʻe ʻaoʻao robot | QCHFM-02R-1000 | 7.Y02086 |
| Modula alapine kiʻekiʻe ʻaoʻao Gripper | QCHFM-02G-1000 | 7.Y02087 |
Modula Uila 15-core-pololei i waho
| Inoa Huahana | Hoʻohālike | PN |
| Modula uila 15-core ʻaoʻao robot | QCHFM-15R1-1000 | 7.Y02097 |
| Modula uila 15-core ʻaoʻao Gripper | QCHFM-15G1-1000 | 7.Y02098 |
Module Mana-laina pololei i waho
| Inoa Huahana | Hoʻohālike | PN |
| Modula alapine kiʻekiʻe ʻaoʻao robot | QCSM-08R-1000 | 7.Y02084 |
| Modula alapine kiʻekiʻe ʻaoʻao Gripper | QCSM-08G-1000 | 7.Y02085 |
ʻO ka pilina uwea pūnaewele RJ45S
| Inoa Huahana | Hoʻohālike | PN |
| ʻO ka modula servo RJ455 ʻaoʻao robot | QCSM-RJ45*5M-06R | 7.Y02129 |
| ʻO ka modula servo RJ455 ʻaoʻao Gripper | QCSM-RJ45*5M-06G | 7.Y02129 |
ʻO kā mākou ʻoihana


Nā māhele huahana
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

MOʻOLELO HOʻOLOI WIKIWIKI - QCA-100 He Ch wikiwiki ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...
-

GRIPPER MODULE SERIES – FPT ʻEkolu mau manamana lima...