HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-40-100 ʻAno ākea o ka mea hoʻopaʻa uila



Māhele Nui
Lima lopako ʻoihana / Lima lopako hana like / Paʻa lima uila / Mea hoʻoikaika akamai / Nā hoʻonā automation
Noi
He liʻiliʻi ka nui o nā mea paʻa lima lopako SCIC Z-EFG me kahi ʻōnaehana servo i kūkulu ʻia, e hiki ai ke hoʻokō i ka kaohi pololei o ka wikiwiki, ke kūlana, a me ka ikaika paʻa. ʻO ka ʻōnaehana paʻa lima ʻoi loa o SCIC no nā hoʻonā automation e hiki ai iā ʻoe ke wehe i nā mea hou no ka hoʻokele automation i nā hana āu i manaʻo ʻole ai he hiki.

Hiʻona

· Ka ikaika paʻa nui, ka laka seif mechanical
· Hoʻololi ʻia ka hahau ʻana, hiki ke hoʻololi ʻia ka ikaika o ka hoʻopaʻa ʻana
·Ola lōʻihi: he ʻumi miliona o nā pōʻaiapuni, e ʻoi aku ana ma mua o nā maiʻuu ea
· Mea hoʻokele i kūkulu ʻia: kapuaʻi liʻiliʻi, hoʻohui maʻalahi
·ʻAno hoʻomalu: 485 (Modbus RTU), I/O
Hahau 40mm, Ikaika Hoʻopaʻa 100N, Mechanical Self-locking, ʻAʻohe Dropdown ma hope o ka pio ʻana o ka mana
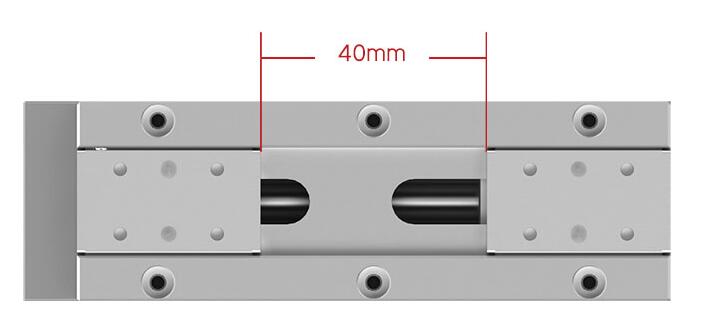
Hahau Nui
Hiki ke hoʻololi ʻia ka hahau holoʻokoʻa he 40mm
Ka Mana Hoʻopaʻa
40-100N, ke kaumaha paʻa ʻōlelo paipai ≤1kg
Laka ponoʻī mīkini
Ka laka ponoʻī ʻana o ka mīkini, ʻaʻohe hāʻule iho ʻana inā pio ka mana
Ua kūkulu ʻia ka mea hoʻokele
ʻO ka uhi lumi liʻiliʻi e kūpono ke hoʻohui.
Wikiwiki e pane
ʻO ka manawa pōkole loa o ka hahau hoʻokahi he 0.4s wale nō
Ola lōʻihi
He ʻumi miliona mau pōʻaiapuni, ma ʻō aku o ka mea paʻa ea

● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● Ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna



Palena kikoʻī
| Kumu Hoʻohālike Helu Z-EFG-40-100 | Nā palena |
| Hahau holoʻokoʻa | 40mm hiki ke hoʻololi ʻia |
| Ka ikaika paʻa | 40-100N hiki ke hoʻololi ʻia |
| Ka hana hou ʻana | ±0.02mm |
| Kaumaha paʻa i ʻōlelo ʻia | ≤1kg |
| ʻAno hoʻoili | ʻAka kia + Alakaʻi poepoe |
| Hoʻopiha hou ʻia ka ʻaila o nā ʻāpana neʻe | I kēlā me kēia ʻeono mahina a i ʻole 1 miliona neʻe ʻana / manawa |
| Ka manawa neʻe hahau hoʻokahi ala | 0.4s |
| ʻAno neʻe | Neʻe ʻelua mau manamana lima ma ke ʻano pālahalaha |
| Kaumaha | 1kg |
| Nā Ana (L * W * H) | 85*37*120mm |
| Ka uila hana | 24V ± 10% |
| Au i helu ʻia | 0.5A |
| Au kiʻekiʻe | 4A |
| Mana | 12W |
| Papa palekana | IP20 |
| ʻAno motika | ʻAʻohe pulumu DC |
| Pae mahana hana | 5-55℃ |
| Pae haʻahaʻa hana | RH35-80 (ʻAʻohe hau) |
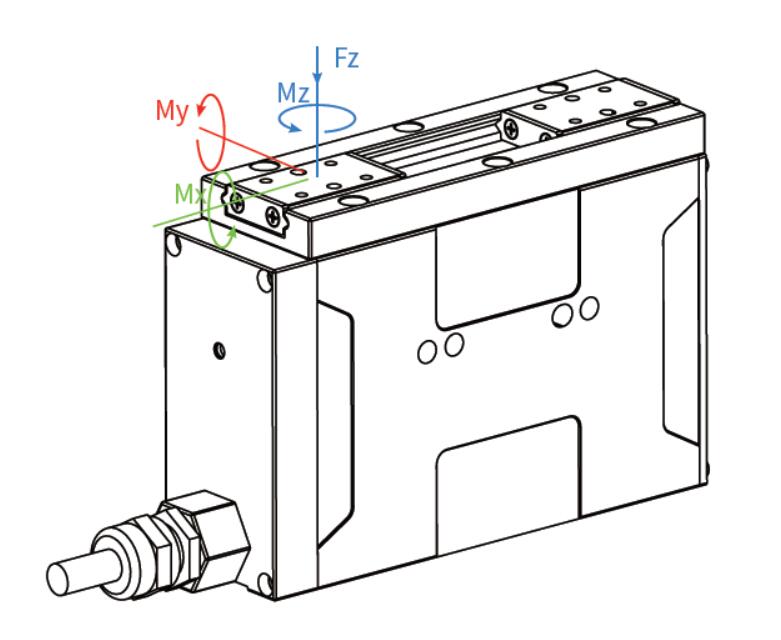
| Ukana paʻa i ʻae ʻia ma ke kuhikuhi kū pololei | |
| Fz: | 200N |
| ʻO ka torque i ʻae ʻia | |
| Mx: | 8 Nm |
| Koʻu: | 6.1 Nm |
| Mz: | 6.1 Nm |
Ka Mana Hoʻoikaika Pololei, Ka Hana Hou Kiʻekiʻe

Ua hoʻohana ka mea paʻa uila Z-EFG-40-100 i kahi hoʻolālā hoʻoili kūikawā a me ka uku algorithm hoʻokele, ʻo ka hahau holoʻokoʻa he 40mm, ʻo ka ikaika clamping he 40-100N, hiki ke hoʻololi ʻia kona hahau a me ka ikaika, a ʻo kona hana hou ʻana he ± 0.02mm.

Wikiwiki e pane, ʻoi aku ka wikiwiki a me ke kūpaʻa

ʻO ka mea paʻa uila e hoʻohana i ke ʻano hoʻoili o ke koʻokoʻo wili + ke kāʻei manawa + alakaʻi pōpō, ʻo kona manawa pōkole loa o ka hahau hoʻokahi ʻo ka manawa hahau he 0.4s wale nō, hiki ke hoʻokō i nā noi clamping no ka laina hana.
Noho ʻia ma kahi liʻiliʻi, kūpono e hoʻohui

Pono ka mea paʻa uila e hoʻohana i 2-manamana-like, ʻo kona nui he L85 * W37 * H120mm, he paʻa kona ʻano, e kākoʻo i nā ʻano hoʻonohonoho ma luna o 5, ua kūkulu ʻia kāna mea hoʻokele, e noho ana i kahi lumi liʻiliʻi, hiki ke maʻalahi ke hana me nā ʻano hana clamping like ʻole.


Hoʻopaʻa palupalu hoʻokele a me ka mea hoʻokele i hoʻohui ʻia

Hiki ke hoʻololi maʻalahi ʻia ka huelo hope o Z-EFG-40-100, ʻo kona kaumaha paʻa he ≤1kg, hiki i ka mea kūʻai ke hoʻolālā i nā ʻāpana huelo e like me nā mea paʻa, e hōʻoia i ka hoʻopau ʻana o ka mea paʻa uila i ka hana paʻa i ka hapa nui loa.
Hoʻonui i nā ʻano hoʻokele, maʻalahi e hana

He maʻalahi ka hoʻonohonoho ʻana o ka mea paʻa uila Z-EFG-40-100, he nui nā ʻano mana, me 485 (Modbus RTU), Pulse, I/O, kahi kūlike me ka ʻōnaehana mana nui PLC.

Kikowaena Ukana o ka Uku Uku
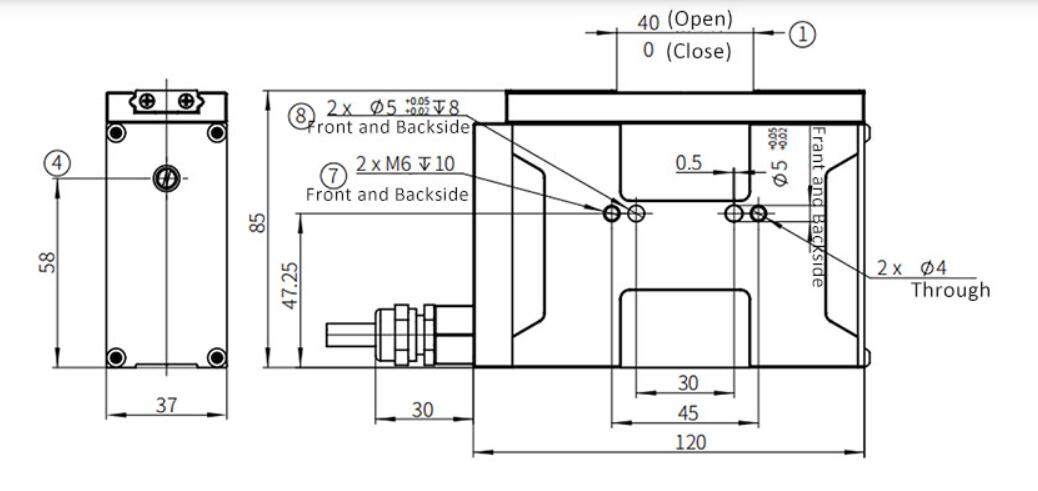
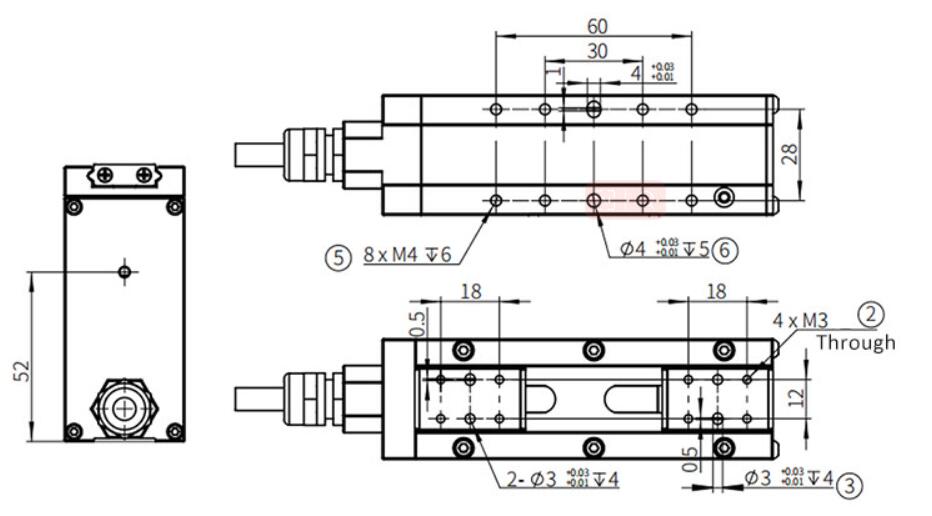
1) Ka hahau ʻana o ka mea paʻa uila
2) Kahi Hoʻokomo (Lua i Hoʻopili ʻia)
3) Kahi Hoʻokomo (Pin Hole)
4) Ke kūlana wehe a pani lima
5) Kahua Hoʻokomo Lalo (Hole Threaded)
6) Kahua Hoʻokomo Lalo (Pin Hole)
7) Kahua Hoʻokomo ʻaoʻao (Pin Hole)
8) Kahua Hoʻokomo ʻaoʻao (Lua Wili)
ʻO kā mākou ʻoihana


Nā māhele huahana
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

HITBOT ELECTRIC GRIPPER SEries – Z-EMG-4 Parall...
-

HITBOT ELECTRIC GRIPPER SEries – Z-EFG-20S Para...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...