HITBOT ELECTRIC GRIPPER SEries – Z-ERG-20C Rotary Electric Gripper



Māhele Nui
Lima lopako ʻoihana / Lima lopako hana like / Paʻa lima uila / Mea hoʻoikaika akamai / Nā hoʻonā automation
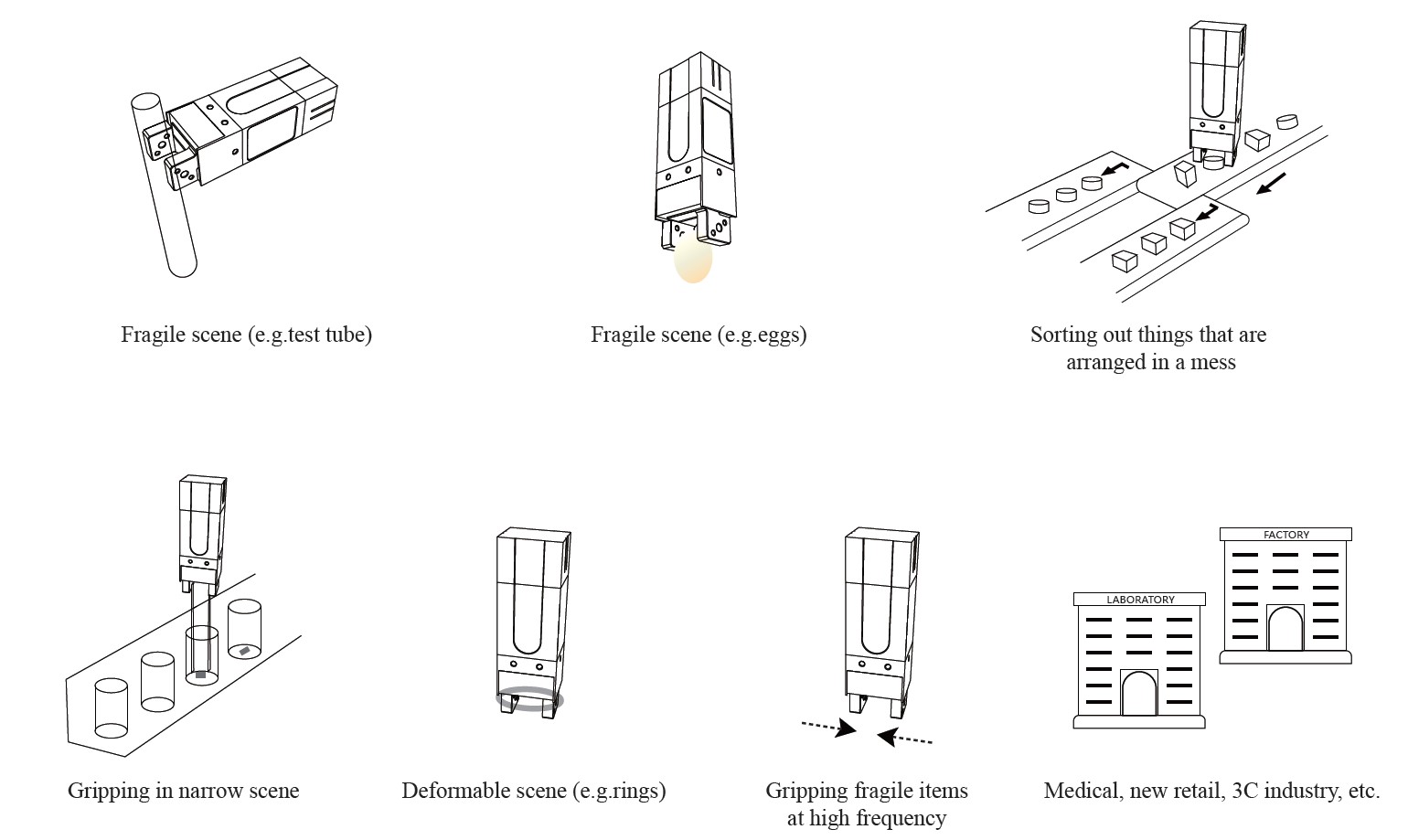
Noi
He liʻiliʻi ka nui o nā mea paʻa lima lopako SCIC Z series me kahi ʻōnaehana servo i kūkulu ʻia, e hiki ai ke hoʻokō i ka kaohi pololei o ka wikiwiki, ke kūlana, a me ka ikaika paʻa. ʻO ka ʻōnaehana paʻa lima ʻoi loa o SCIC no nā hoʻonā automation e hiki ai iā ʻoe ke wehe i nā mea hou no ka hoʻokele automation i nā hana āu i manaʻo ʻole ai he hiki.
Hiʻona

· Kākoʻo i ka wili palena ʻole a me ka wili pili, ʻaʻohe apo paheʻe, uku mālama haʻahaʻa
· Hiki ke hoʻokele pololei ʻia ka hoʻohuli a me ka ikaika paʻa, ke kūlana a me ka wikiwiki
· Ola lōʻihi, nā pōʻaiapuni he nui, hana maikaʻi ma mua o ka prenumatic gripper
· Mea hoʻokele i kūkulu ʻia: noho liʻiliʻi a maʻalahi hoʻi e hoʻohui
· ʻAno hoʻomalu: kākoʻo i ka mana kaʻa Modbus a me I/O
● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● Ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna

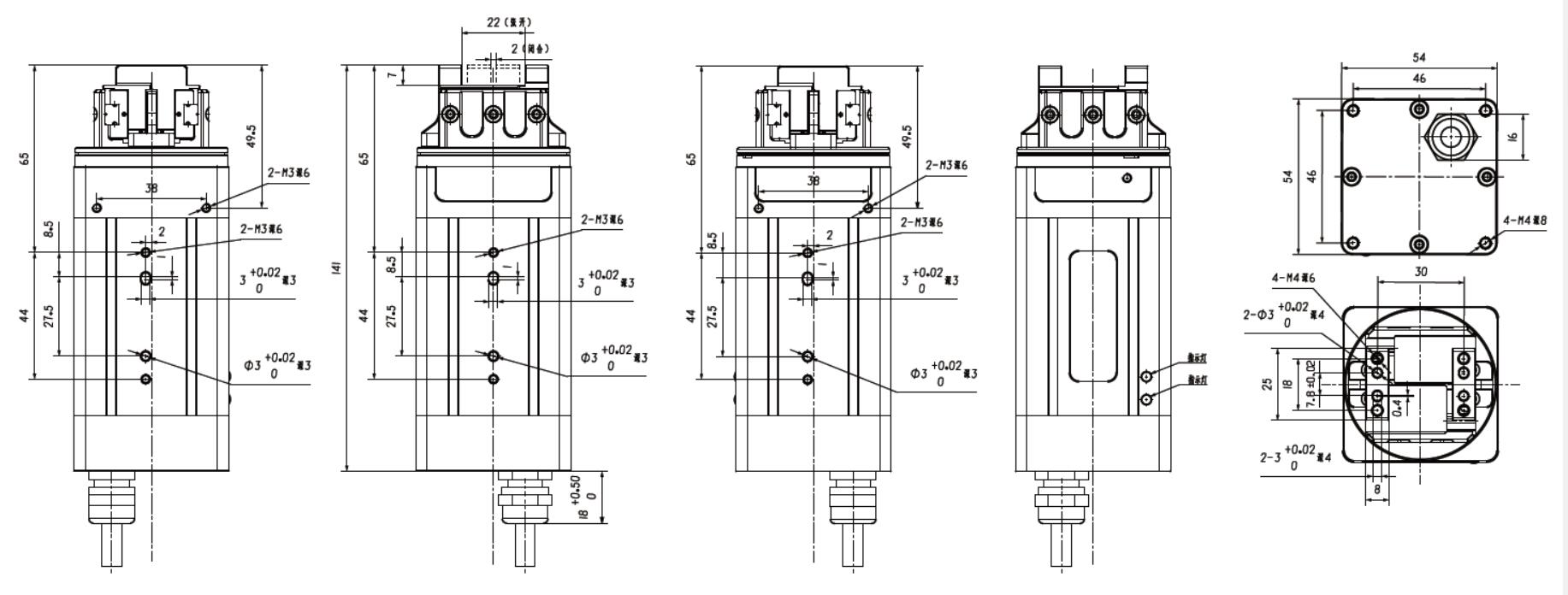
Palena kikoʻī
ʻO ka mea paʻa lima uila Z-ERG-20C, he ʻōnaehana servo i hoʻohui ʻia, he liʻiliʻi kona nui, ʻoi aku ka maikaʻi o ka hana sanding.
| Kumu Hoʻohālike Helu Z-ERG-20C | Nā palena |
| Hahau holoʻokoʻa | 20mm hiki ke hoʻololi ʻia |
| Ka ikaika paʻa | 10-35N hiki ke hoʻololi ʻia |
| Ka hana hou ʻana | ±0.2mm |
| Kaumaha paʻa i ʻōlelo ʻia | ≤0.4kg |
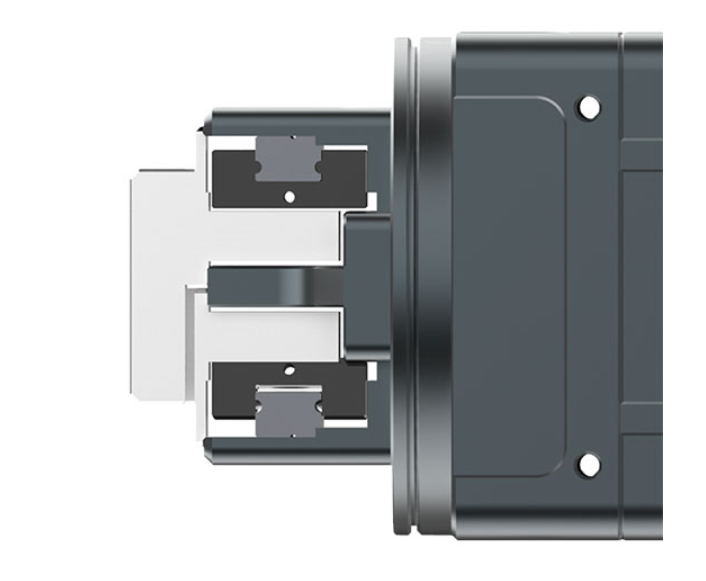
| ʻAno hoʻoili | ʻO ka ʻūpā kia + alakaʻi laina |
| Hoʻopiha hou ʻia ka ʻaila o nā ʻāpana neʻe | I kēlā me kēia ʻeono mahina a i ʻole 1 miliona neʻe ʻana / manawa |
| Ka manawa neʻe hahau hoʻokahi ala | 0.3s |
| Ka hoʻohuli ʻana i ka torque kiʻekiʻe loa | 0.3 Nm |
| Ka wikiwiki loa o ka hoʻohuli ʻana | 180 RPM |
| Ka laulā o ka hoʻohuli ʻana | Hoʻohuli palena ʻole |
| Ka hoʻohuli ʻana i ka hopena | ±1° |
| Kaumaha | 1.0kg |
| Nā Ana | 54*54*141mm |
| Ka uila hana | 24V ± 10% |
| Au i helu ʻia | 1.5A |
| Ka manawa kiʻekiʻe loa | 3A |
| Mana | 30W |
| Papa palekana | IP20 |
| ʻAno motika | Motika lawelawe |
| Pae mahana hana | 5-55℃ |
| Pae haʻahaʻa hana | RH35-80 (ʻAʻohe hau) |
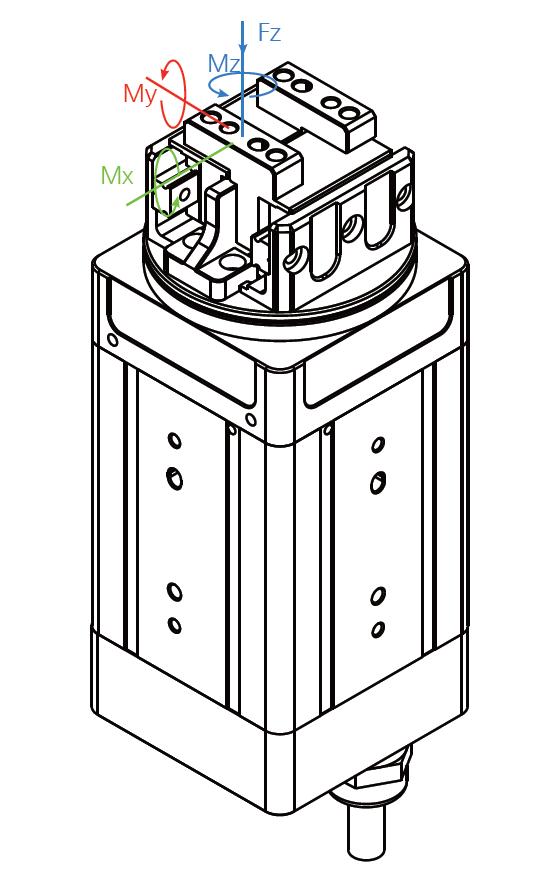
| Ukana paʻa i ʻae ʻia ma ke kuhikuhi kū pololei | |
| Fz: | 100N |
| ʻO ka torque i ʻae ʻia | |
| Mx: | 1.35 Nm |
| Koʻu: | 0.8 Nm |
| Mz: | 0.8 Nm |



Nā kikoʻī
ʻŌnaehana Servo Hoʻohui ʻia, Rotation Electric Gripper
Nā noi he nui
Kākoʻo i ka wili palena ʻole a me ka wili pili
Hana Kūʻai Kiʻekiʻe
ʻAʻohe apo paheʻe, haʻahaʻa ke kumukūʻai mālama
Ka Mana Pololei
Hiki ke hoʻokele pololei ʻia kona wikiwiki o ka wili a me ka ikaika o ka hoʻopaʻa ʻana
Ola lōʻihi
He ʻumi miliona mau pōʻaiapuni, ma ʻō aku o ka mea paʻa ea
Ua kūkulu ʻia ka mea hoʻokele
Noho i kahi lumi liʻiliʻi, kūpono e hoʻohui
ʻAno Mana
Kākoʻo i ka Modbus Main Line a me ka I/O Control

● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● Ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna
Hana piha, ʻAno paʻa

ʻO ka mea paʻa uila hoʻohuli Z-ERG-20C, he ʻōnaehana servo i hoʻohui ʻia, liʻiliʻi kona nui, hana koʻikoʻi.


Hoʻokele a me ka Hoʻokele Hoʻohui ʻia, Hoʻopaʻa Palupalu
ʻO ka manawa o ka wehe/pani ʻana he 0.3s wale nō kona wikiwiki, ka ikaika clamping, hiki ke hoʻomalu pololei ʻia e Modbus, kākoʻo ia i ka clamping palupalu, hiki ke clamp i nā mea palupalu, e like me ka curd, ka paipu a me ka hua manu, a pēlā aku.
Ka hana hou ʻana kiʻekiʻe loa
ʻO ka hana hou ʻana o ka mea paʻa uila he ± 0.02mm, ma o ka ikaika pololei a me ka kaohi kūlana, hiki i ka mea paʻa uila ke paʻa hou i ka hoʻopau ʻana i nā hana o ka hoʻopaʻa ʻana a me ka wili ʻana.

Hoʻonui i nā ʻano hoʻokele, maʻalahi e hana
He hoʻonohonoho maʻalahi ka hoʻopaʻa ʻana i ka uila, no ka hoʻohana ʻana i ka protocol kamaʻilio o ka I/O kikohoʻe, pono wale i hoʻokahi kaula e hoʻopili ai iā ON/OFF, i mea e kūpono loa ai me ka ʻōnaehana mana nui PLC.
Hahau lōʻihi, nā kahua noi ākea

ʻO ka mea paʻa uila ʻoihana me ka hahau holoʻokoʻa 20mm, hiki i kona ikaika hoʻopaʻa ke piʻi i 10-35N, ʻo ka torque rotation he 0.3Nm, hiki ke hoʻohana nui ʻia no ka biomedicine, ka pākahi lithium, nā ʻāpana kaʻa, 3C, ka meaʻai, nā huahana aniani, nā mea hoʻonani, ka hana ʻana i nā mīkini hana, ka plastic i hoʻoheheʻe ʻia, ka logistics a me nā ʻoihana semiconductor, a pēlā aku.
Kikowaena Ukana o ka Uku Uku
ʻO kā mākou ʻoihana


Nā māhele huahana
-

HITBOT ELECTRIC GRIPPER SEries – Z-EFG-10...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGS SERIES –...
-

GRIPPER MODULE SERIES - FPT ʻElua manamana lima T ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

GRIPPER MODULE SERIES – FPT ʻEkolu mau manamana lima...