HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-C50 Collaborative Electric Gripper




Māhele Nui
Lima lopako ʻoihana / Lima lopako hana like / Paʻa lima uila / Mea hoʻoikaika akamai / Nā hoʻonā automation
Noi
He liʻiliʻi ka nui o nā mea paʻa lima lopako SCIC Z-EFG me kahi ʻōnaehana servo i kūkulu ʻia, e hiki ai ke hoʻokō i ka kaohi pololei o ka wikiwiki, ke kūlana, a me ka ikaika paʻa. ʻO ka ʻōnaehana paʻa lima ʻoi loa o SCIC no nā hoʻonā automation e hiki ai iā ʻoe ke wehe i nā mea hou no ka hoʻokele automation i nā hana āu i manaʻo ʻole ai he hiki.

Hiʻona

· ʻIke ʻana i ka hāʻule ʻana o ka Gripper, hana hoʻopuka wahi
·Hiki ke hoʻomalu pololei ʻia ka ikaika, ke kūlana a me ka wikiwiki ma o Modbus
·Ola lōʻihi: he ʻumi miliona o nā pōʻaiapuni, e ʻoi aku ana ma mua o nā maiʻuu ea
· Mea hoʻokele i kūkulu ʻia: kapuaʻi liʻiliʻi, hoʻohui maʻalahi
·ʻAno hoʻomalu: 485 (Modbus RTU), I/O
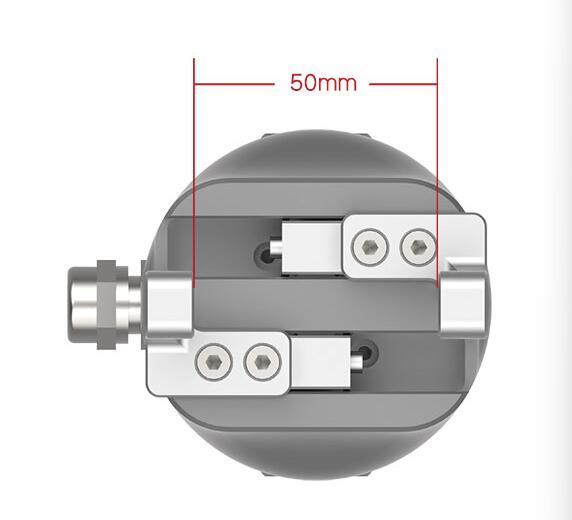
Hahau 50mm, Ikaika Hoʻopaʻa 140N, Kūlike me ka Lima Lopako 6-axis.
Alapine Kiʻekiʻe
ʻO ka manawa hahau pōkole loa he 0.5s
Kiʻekiʻe pololei
ʻO ka hana hou ʻana he ± 0.03mm
Ukana kiʻekiʻe
Kaumaha paʻa manaʻo ≤2kg
Hoʻopili a Pāʻani
ʻO ka mea paʻa uila no ka lima robot 6-axis
Hiki ke hoʻololi ʻia ka huelo
Hiki ke loli kona huelo, kūpono no nā noi like ʻole
Ka Mana Hoʻopaʻa Palupalu
Hiki iā ia ke hoʻopaʻa i nā mea palupalu a kīnā

● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● ʻO ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna



Palena kikoʻī
| Kumu Hoʻohālike Helu Z-EFG-C50 | Nā palena |
| Hahau holoʻokoʻa | 50mm hiki ke hoʻololi ʻia |
| Ka ikaika paʻa | 40-140N hiki ke hoʻololi ʻia |
| Ka hana hou ʻana | ±0.03mm |
| Kaumaha paʻa i ʻōlelo ʻia | ≤2kg |
| ʻAno hoʻoili | ʻAka kia + Alakaʻi poepoe |
| Hoʻopiha hou ʻia ka ʻaila o nā ʻāpana neʻe | I kēlā me kēia ʻeono mahina a i ʻole 1 miliona neʻe ʻana / manawa |
| Ka manawa neʻe hahau hoʻokahi ala | 0.5s |
| ʻAno neʻe | Neʻe ʻelua mau manamana lima ma ke ʻano pālahalaha |
| Kaumaha | 1kg |
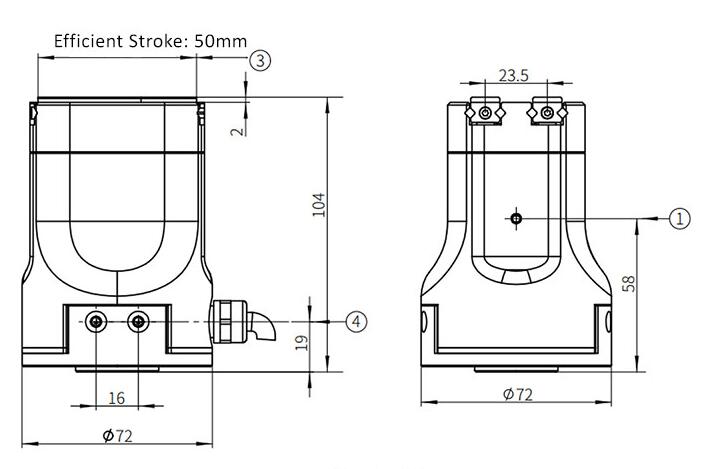
| Nā Ana (L * W * H) | 72*72*143mm |
| Ka uila hana | 24V ± 10% |
| Au i helu ʻia | 0.8A |
| Au kiʻekiʻe | 2A |
| Mana | 20W |
| Papa palekana | IP20 |
| ʻAno motika | ʻAʻohe pulumu DC |
| Pae mahana hana | 5-55℃ |
| Pae haʻahaʻa hana | RH35-80 (ʻAʻohe hau) |

| Ukana paʻa i ʻae ʻia ma ke kuhikuhi kū pololei | |
| Fz: | 300N |
| ʻO ka torque i ʻae ʻia | |
| Mx: | 7 Nm |
| Koʻu: | 7 Nm |
| Mz: | 7 Nm |
Hoʻokele a me ka Luna Hoʻokele i Hoʻohui ʻia
Loaʻa i ka mea paʻa uila Z-EFG-C50 kahi ʻōnaehana servo i hoʻohui ʻia i loko, ʻo kona holoʻokoʻa he 50mm, ʻo ka ikaika hoʻopaʻa he 40-140N, hiki ke hoʻololi ʻia kona hahau a me ka ikaika hoʻopaʻa, a ʻo kona hana hou ʻana he ±0.03mm.

Kūlike me ka ʻEono-Axis Robot Arm

Hiki i ka mea paʻa uila ke kūlike me ka lima robot 6-axis, no ka hoʻomaopopo ʻana i ka plug a me ka pāʻani, ʻo kona manawa hahau pōkole loa he 0.5s wale nō, hiki ke hoʻokō i nā noi clamping no ka laina hana paʻa.
Liʻiliʻi ka nui, hiki ke hoʻouka

ʻO Z-EFG-C50 ke hoʻohana i ke ʻano hoʻoili o ka pahu kiaʻi + kaʻaahi alakaʻi pōpō, ʻo ka nui o ka huahana ʻo L72 * W72 * H143mm, hiki ke maʻalahi ke hoʻonohonoho i ke kūlana o kahi liʻiliʻi.


Ka Pane Wikiwiki, Ka Pololei no ka Mana Hoʻomalu

ʻO ka manawa pōkole loa o ka hahau hoʻokahi he 0.5s wale nō, hiki iā ia ke hana me ka hana clamping wikiwiki, hiki ke hoʻololi ʻia kona mau ʻāpana huelo i kēlā me kēia manawa, hiki i nā mea kūʻai ke hoʻoponopono i nā huelo e like me ke koi.
Hoʻonui i nā ʻano hoʻokele, maʻalahi e hana

He maʻalahi ka hoʻonohonoho ʻana o Z-EFG-C50, he nui nā ʻano hoʻomalu, me 485 (Modbus RTU), Pulse, I/O, a kūlike ia me ka ʻōnaehana hoʻomalu nui PLC.

Kikowaena Ukana o ka Uku Uku
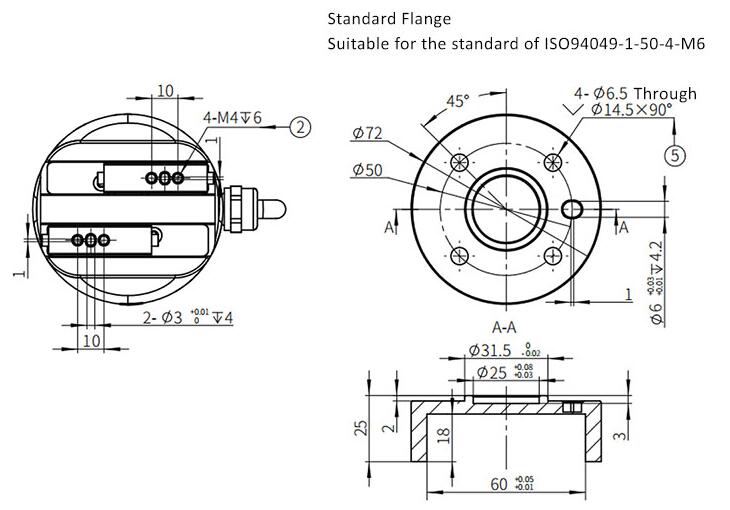
1. Hōʻailona LED
2. Kahi Hoʻokomo, e hoʻohana i nā wili M4 4pcs
3. ʻO ka hahau o ka mea paʻa uila he 50mm
4. Hale Kūʻai Nati
5. Kahua hoʻonohonoho, e hoʻohana i nā wili 4pcs M6 e hoʻopili me ka flange terminal o ka lima lopako hana like
ʻO kā mākou ʻoihana


Nā māhele huahana
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...