HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-C65 Collaborative Electric Gripper




Māhele Nui
Lima lopako ʻoihana / Lima lopako hana like / Paʻa lima uila / Mea hoʻoikaika akamai / Nā hoʻonā automation
Noi
He liʻiliʻi ka nui o nā mea paʻa lima lopako SCIC Z-EFG me kahi ʻōnaehana servo i kūkulu ʻia, e hiki ai ke hoʻokō i ka kaohi pololei o ka wikiwiki, ke kūlana, a me ka ikaika paʻa. ʻO ka ʻōnaehana paʻa lima ʻoi loa o SCIC no nā hoʻonā automation e hiki ai iā ʻoe ke wehe i nā mea hou no ka hoʻokele automation i nā hana āu i manaʻo ʻole ai he hiki.

Hiʻona

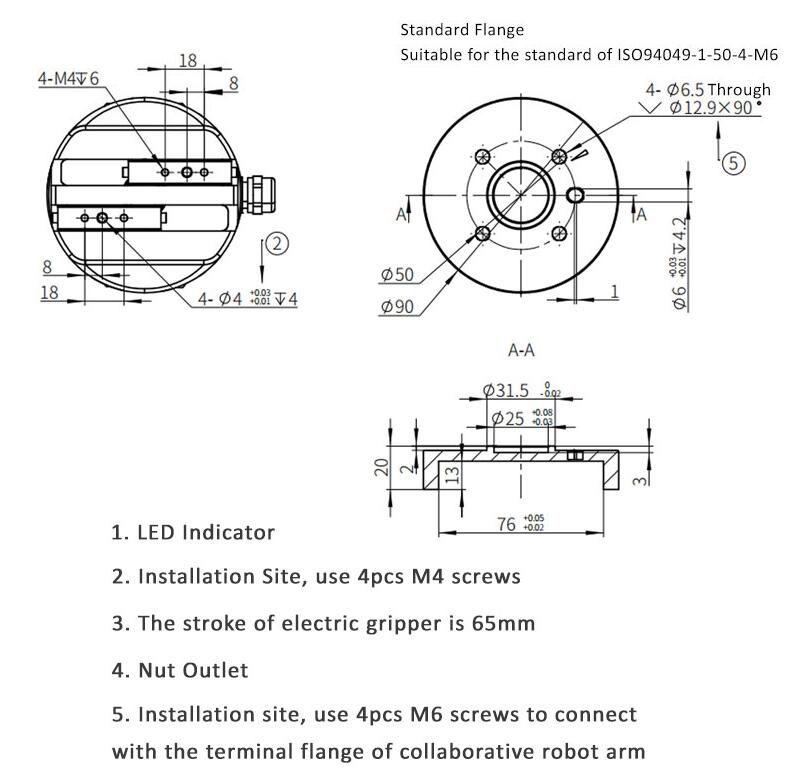
· ʻIke ʻana i ka hāʻule ʻana o ka Gripper, hana hoʻopuka wahi
·Hiki ke hoʻomalu pololei ʻia ka ikaika, ke kūlana a me ka wikiwiki ma o Modbus
·Ola lōʻihi: he ʻumi miliona o nā pōʻaiapuni, e ʻoi aku ana ma mua o nā maiʻuu ea
· Mea hoʻokele i kūkulu ʻia: kapuaʻi liʻiliʻi, hoʻohui maʻalahi
·ʻAno hoʻomalu: 485 (Modbus RTU), I/O
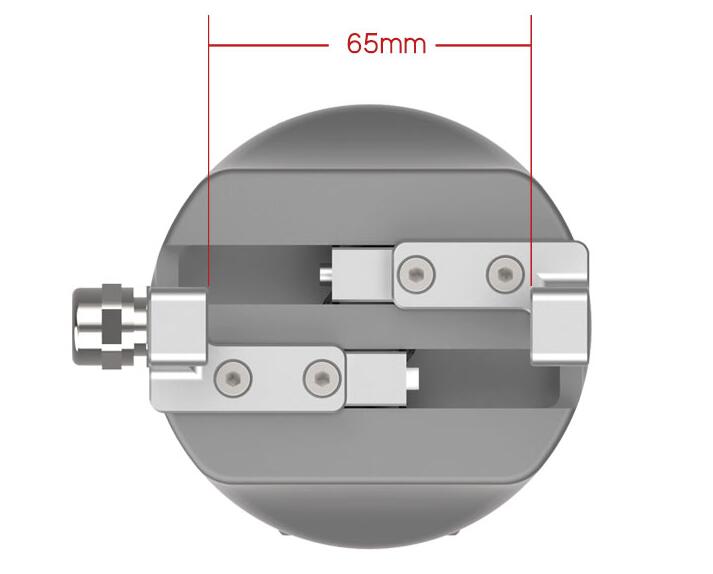
Stoke 65mm, Clamping Force 300N, Kūlike me ka lima robot 6-axis
Alapine Kiʻekiʻe
ʻO ka manawa hahau pōkole loa he 0.5s
Kiʻekiʻe pololei
ʻO ka hana hou ʻana he ± 0.03mm
Ukana kiʻekiʻe
Kaumaha paʻa manaʻo ≤1.5 kg
Hoʻopili a Pāʻani
ʻO ka mea paʻa uila no ka lima robot 6-axis
Hiki ke hoʻololi ʻia ka huelo
Hiki ke loli kona huelo, kūpono no nā noi like ʻole
Hoʻopaʻa palupalu
Hiki iā ia ke hoʻopaʻa i nā mea palupalu a kīnā

● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● ʻO ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna



Palena kikoʻī
| Kumu Hoʻohālike Helu Z-EFG-C65 | Nā palena |
| Hahau holoʻokoʻa | 65mm hiki ke hoʻololi ʻia |
| Ka ikaika paʻa | 60-300N hiki ke hoʻololi ʻia |
| Ka hana hou ʻana | ±0.03mm |
| Kaumaha paʻa i ʻōlelo ʻia | ≤6kg |
| ʻAno hoʻoili | ʻAka kia + Alakaʻi poepoe |
| Hoʻopiha hou ʻia ka ʻaila o nā ʻāpana neʻe | I kēlā me kēia ʻeono mahina a i ʻole 1 miliona neʻe ʻana / manawa |
| Ka manawa neʻe hahau hoʻokahi ala | 0.5s |
| ʻAno neʻe | Neʻe ʻelua mau manamana lima ma ke ʻano pālahalaha |
| Kaumaha | 1.5kg |
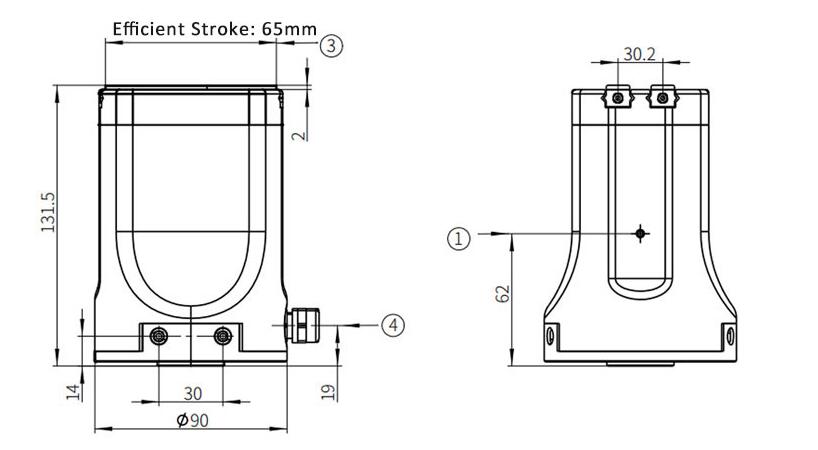
| Nā Ana (L * W * H) | 90*90*178mm |
| Ka uila hana | 24V ± 10% |
| Au i helu ʻia | 0.8A |
| Au kiʻekiʻe | 2A |
| Mana | 20W |
| Papa palekana | IP20 |
| ʻAno motika | ʻAʻohe pulumu DC |
| Pae mahana hana | 5-55℃ |
| Pae haʻahaʻa hana | RH35-80 (ʻAʻohe hau) |

| Ukana paʻa i ʻae ʻia ma ke kuhikuhi kū pololei | |
| Fz: | 600N |
| ʻO ka torque i ʻae ʻia | |
| Mx: | 15 Nm |
| Koʻu: | 15 Nm |
| Mz: | 15 Nm |
Hoʻokele a me ka Luna Hoʻokele i Hoʻohui ʻia
Loaʻa i ka mea paʻa uila Z-EFG-C65 kahi ʻōnaehana servo i hoʻohui ʻia i loko, ʻo kona holoʻokoʻa he 65mm, ʻo ka ikaika hoʻopaʻa he 60-300N, hiki ke hoʻololi ʻia kona hahau a me ka ikaika hoʻopaʻa, a ʻo kona hana hou ʻana he ±0.03mm.

Kūlike me ka ʻEono-Axis Robot Arm

Hiki i ka mea paʻa uila ke kūlike me ka lima robot 6-axis, no ka hoʻomaopopo ʻana i ka plug a me ka pāʻani, ʻo kona manawa hahau pōkole loa he 0.5s wale nō, hiki ke hoʻokō i nā noi clamping no ka laina hana paʻa.
Liʻiliʻi ka nui, hiki ke hoʻouka

ʻO Z-EFG-C65 ke hoʻohana i ke ʻano hoʻoili o ka pahu kiaʻi + kaʻaahi alakaʻi pōpō, ʻo ka nui o ka huahana ʻo L90 * W90 * H178mm, hiki ke maʻalahi ke hoʻonohonoho i ke kūlana o kahi liʻiliʻi.


Ka Pane Wikiwiki, Ka Pololei no ka Mana Hoʻomalu

ʻO ka manawa pōkole loa inā he 0.5s wale nō ka hahau hoʻokahi, hiki iā ia ke hana me ka hana hoʻopaʻa wikiwiki, hiki ke hoʻololi ʻia kona mau ʻāpana huelo i kēlā me kēia manawa, hiki i nā mea kūʻai ke hoʻoponopono i nā huelo e like me ke koi.
Hoʻonui i nā ʻano hoʻokele, maʻalahi e hana

He maʻalahi ka hoʻonohonoho ʻana o Z-EFG-C50, nui nā ʻano hoʻokele, me 485 (Modbus RTU), Pulse, I/O, a kūlike ia me ka ʻōnaehana hoʻokele nui PLC.

Kikowaena Ukana o ka Uku Uku
ʻO kā mākou ʻoihana


Nā māhele huahana
-

DH ROBOTICS SERVO ELECTRIC GRIPPER AG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGS SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...