HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-R Collaborative Electric Gripper



Māhele Nui
Lima lopako ʻoihana / Lima lopako hana like / Paʻa lima uila / Mea hoʻoikaika akamai / Nā hoʻonā automation
Noi
He liʻiliʻi ka nui o nā mea paʻa lima lopako SCIC Z-EFG me kahi ʻōnaehana servo i kūkulu ʻia, e hiki ai ke hoʻokō i ka kaohi pololei o ka wikiwiki, ke kūlana, a me ka ikaika paʻa. ʻO ka ʻōnaehana paʻa lima ʻoi loa o SCIC no nā hoʻonā automation e hiki ai iā ʻoe ke wehe i nā mea hou no ka hoʻokele automation i nā hana āu i manaʻo ʻole ai he hiki.

Hiʻona

·He mea paʻa lima uila servo liʻiliʻi akā ikaika.
·Hiki ke hoʻololi ʻia nā kikowaena e hoʻokō i nā koi papahana like ʻole.
·Hiki ke hōʻiliʻili i nā mea palupalu a loli, e like me nā hua manu, nā ʻōmole hoʻāʻo, nā apo, a pēlā aku.
·Kūpono no nā hiʻohiʻona me ka ʻole o nā kumu ea (e like me nā keʻena hoʻokolohua, a me nā haukapila).
ʻŌnaehana Servo Hoʻohui i Hoʻopili ʻia no nā ʻano noi like ʻole
Ka Mana Hoʻopaʻa Nui
Ka ikaika hoʻopaʻa: 80N,
hahau: 20mm
Ka Mana Pololei
Ka hana hou ʻana: ±0.02mm
Hoʻopili a Pāʻani
Hoʻolālā kūikawā ʻia nomea paʻa uila ʻeono axis
Ua kūkulu ʻia ka mea hoʻokele
Uhi ʻāpana liʻiliʻi, kūpono e hoʻohui.
Hiki ke hoʻololi ʻia ka huelo
Hiki ke hoʻololi ʻia kona huelo e noi ʻia no nā noi like ʻole.
Hoʻopaʻa palupalu
Hiki iā ia ke hoʻopaʻa i nā mea palupalu

● Ke hoʻolaha nei i kahi kipi i ka hoʻololi ʻana o nā mea paʻa pneumatic e nā mea paʻa uila, ʻo ia ka mea paʻa uila mua me ka ʻōnaehana servo i hoʻohui ʻia ma Kina.
● Hoʻololi kūpono no ka mea hoʻopili ea + kānana + kiwikā solenoid + kiwikā throttle + mea paʻa pneumatic
● Ke ola lawelawe o nā pōʻaiapuni he nui, e kūlike me ka cylinder Kepanī kuʻuna




Palena kikoʻī
He mea paʻa lima uila robotic ka Z-EFG-R me kahi mea hoʻokele i kūkulu ʻia a me nā hana he nui i hoʻokahi. Liʻiliʻi ka nui, akā ikaika ka hana.
● He mea paʻa lima uila servo liʻiliʻi akā ikaika.
●Hiki ke hoʻololi ʻia nā kikowaena e hoʻokō i nā koi papahana like ʻole.
● Hiki ke hāpai i nā mea palupalu a hiki ke hoʻololi ʻia, e like me nā hua manu, nā ʻōmole hoʻāʻo, nā apo, a pēlā aku.
● Kūpono no nā hiʻohiʻona me ka ʻole o nā kumu ea (e like me nā keʻena hoʻokolohua, a me nā haukapila).
He mea paʻa uila liʻiliʻi ʻo Z-EFG-R i loaʻa ka ʻōnaehana servo i hoʻohui ʻia, hiki iā ia ke pani i ka pamu + kānana + waiwai magnetic electron + throttle valve + air gripper.
| Kumu Hoʻohālike Helu Z-EFG-R | Nā palena |
| Hahau holoʻokoʻa | 20mm |
| Ka ikaika paʻa | 80N |
| Ka hana hou ʻana | ±0.02mm |
| Kaumaha paʻa i ʻōlelo ʻia | 0.8kg |
| ʻAno hoʻoili | ʻO ka ʻūpā kia + alakaʻi wili keʻa |
| Hoʻopiha hou ʻia ka ʻaila o nā ʻāpana neʻe | I kēlā me kēia ʻeono mahina a i ʻole 1 miliona neʻe ʻana / manawa |
| Ka manawa neʻe hahau hoʻokahi ala | 0.45s |
| Pae mahana hana | 5-55℃ |
| Pae haʻahaʻa hana | RH35-80 (ʻAʻohe hau) |
| ʻAno neʻe | Neʻe ʻelua mau manamana lima ma ke ʻano pālahalaha |
| Kaohi ʻana i ka hahau ʻana | Hoʻololi ʻia |
| Hoʻoponopono ikaika paʻa | Hoʻololi ʻia |
| Kaumaha | 0.5kg |
| Nā Ana (L * W * H) | 68*68*132.7mm |
| Ke kau ʻana o ka mea hoʻokele | Kūkulu ʻia |
| Mana | 5W |
| ʻAno motika | ʻAʻohe pulumu DC |
| Ka uila i helu ʻia | 24V |
| Au kiʻekiʻe | 1A |
| Lima lopako ʻeono-axis hiki ke hoʻololi ʻia | UR, ʻAubo |
Ua kūkulu ʻia ka hoʻokele a me ka mea hoʻokele
He mea paʻa uila liʻiliʻi ʻo Z-EFG-R i loaʻa ka ʻōnaehana servo i hoʻohui ʻia, hiki iā ia ke pani i ka pamu ea + kānana + kiwikā magnetic electron + kiwikā throttle + mea paʻa ea.


Kūlike me ka ʻEono-Axis Robot Arm
Hiki i ka gripper ke kūlike me ka lima robot ʻeono axis mainstream, no ka hoʻokō ʻana i ka plug a me ka pāʻani, he 20mm ka lōʻihi o ka hahau ʻana, ʻo ka ikaika clamping he 80N, hiki ke hoʻololi ʻia kona hahau a me ka ikaika clamping.
Kiʻi liʻiliʻi, maʻalahi e hoʻouka
ʻO ka nui o Z-EFG-R he L68 * W68 * H132.7mm, he liʻiliʻi kona ʻano, kākoʻo i nā ʻano hoʻonohonoho he nui, ua kūkulu ʻia ka mea hoʻokele, he wahi liʻiliʻi e noho ana, he maʻalahi ke noi no nā noi like ʻole o nā hana clamping.

Ka wikiwiki e pane, ka mana pololei
ʻO ka manawa neʻe pōkole loa o ka hahau hoʻokahi he 0.45s, ʻo kona hana hou ʻana he ± 0.02mm, hiki ke hoʻololi ʻia kona ʻāpana huelo me ka ʻoluʻolu, hiki i nā mea kūʻai ke hoʻopaʻa i ka mea e like me ke noi.
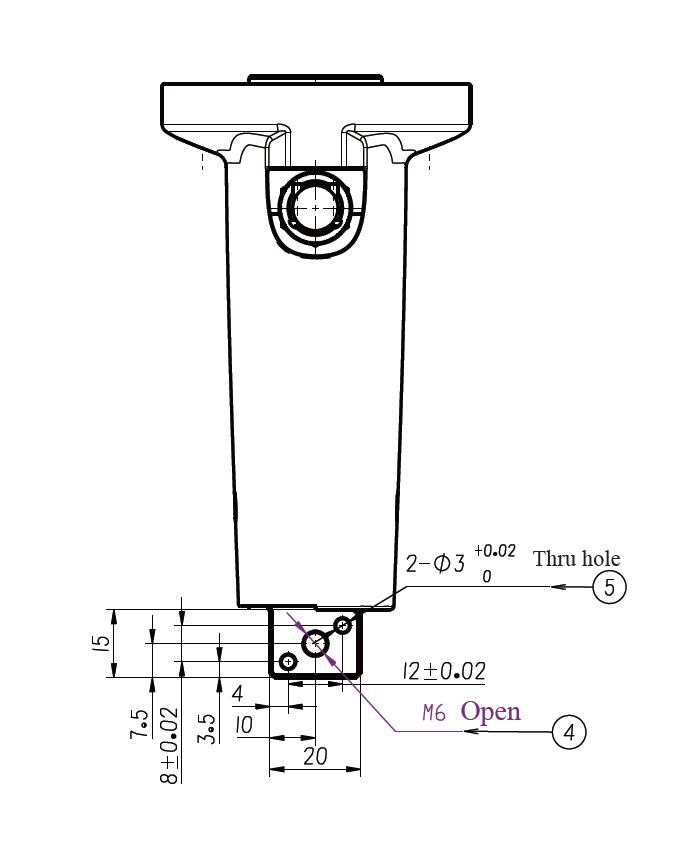
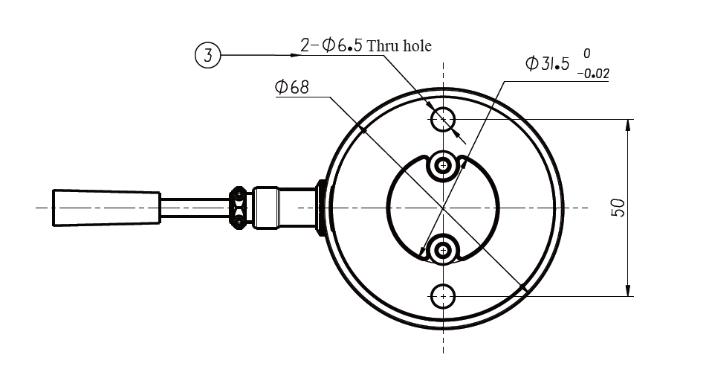
Kiʻikuhi Hoʻokomo Ana
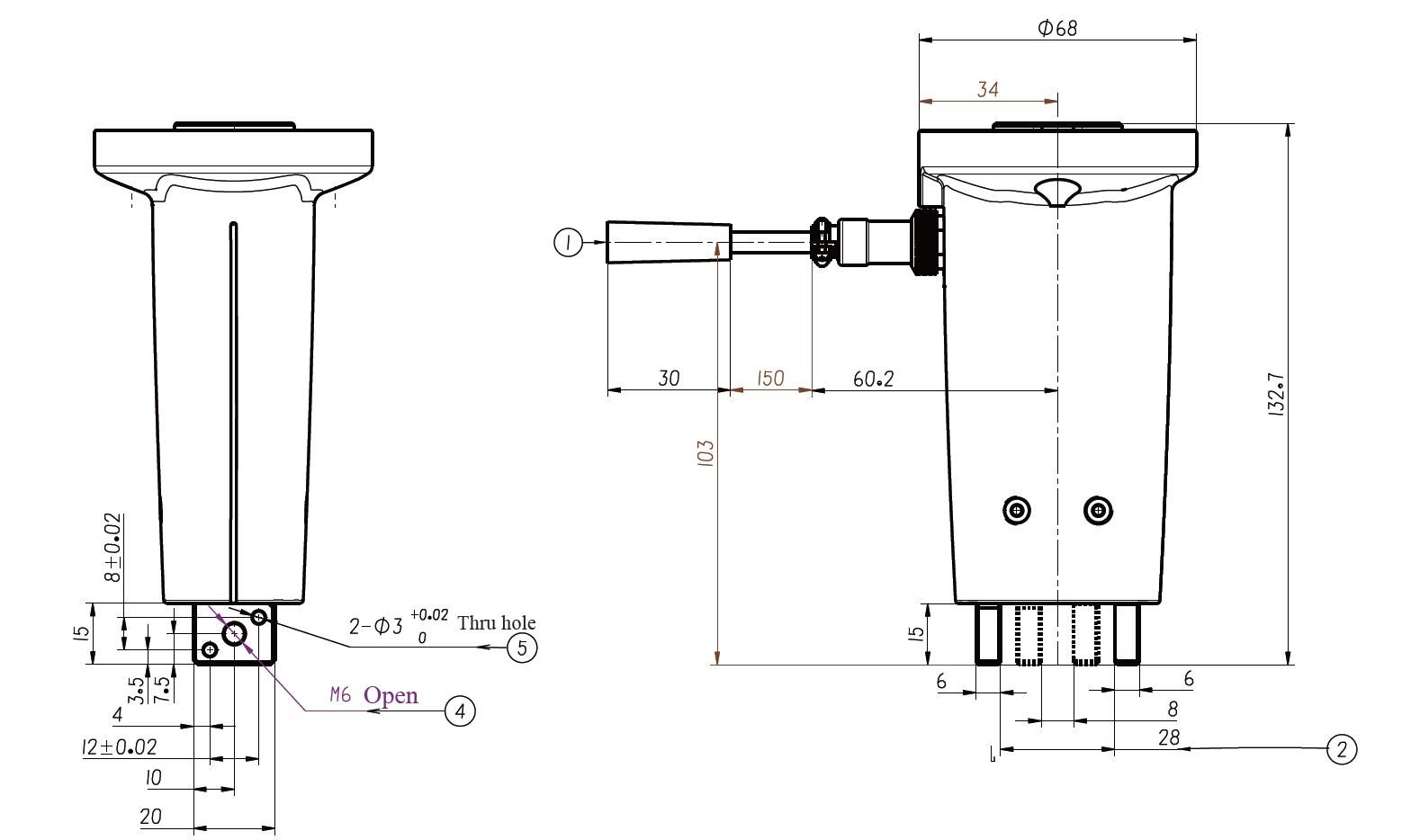
① RKMV8-354 ʻElima mau kikowaena mokulele plug i RKMV8-354
② ʻO ka hahau o ka mea paʻa uila he 20mm
③ Ke kūlana hoʻonohonoho, e hoʻohana i ʻelua mau wili M6 e hoʻopili me ka flange ma ka hopena o ka lima robot UR
④ Kūlana hoʻonohonoho, kūlana hoʻonohonoho paʻa (wili M6)
⑤ Kūlana hoʻonohonoho, kūlana hoʻonohonoho paʻa (3 mau lua pine cylindrical)
Nā Palena Uila
Ka uila i helu ʻia 24±2V
0.4A o kēia manawa

ʻO kā mākou ʻoihana







